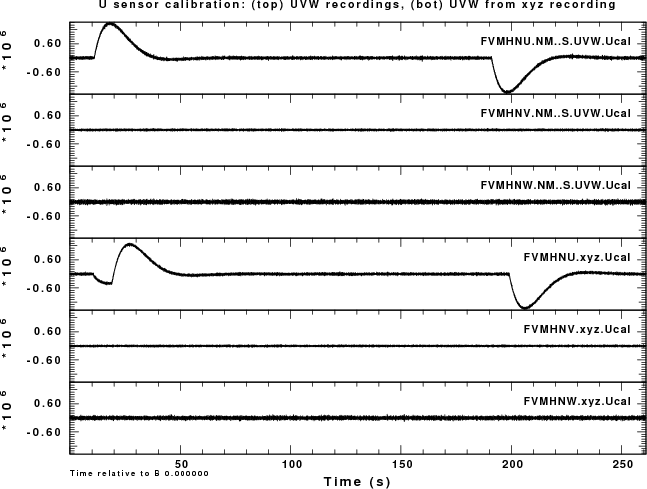
Fig 1. Shows the result of placing a calibration pulse on the U sensor. The top three traces were recorded in the UVW mode. The bottom three traces are the simulated UVW recordings obtained using the gsac command rotate3 to uvwtril.
April 1, 2009
Hi,
The 0036 trillium was jumpered into UVW mode and
0.78v positive steps were applied to the 13.6KOhm cal input.
from 17:39 to 1745 a pulse was applied to all components.
i.e. all cal enables were enabled.
from 18:14 to 18:20 a pulse was applied with the U cal enabled
data on the HNE channel
from 18:34 to 18:40 a pulse was applied with the V cal enabled.
data on the HNN channel.
from 19:04 to 19:10 a pulse was applied with the W cal enabled.
data on the HNZ channel.
About 19: the seis was switched to XYZ mode.
from 19:24 to 19:29 a pulse was applied with the W cal enabled
from 20:04 to 20:10 a pulse was applied with the V cal enabled.
from 20:24 to 20:30 a pulse was applied with the U cal enabled.
data on ew-slu1 under the directory /cnmsn/FVM/ currently the active file.
The data were recorded on a Q330 test system on channels 456. The
miniSEED was converted to Sac files for the three components to form a
14,000 second long time series starting a 2009 09 01 17 38 00.
The script DOIT was used to extract the
signals from the labs notes given above, and processed to provide the
fillowing images.
Fig 1. Shows the result of placing a calibration pulse on the U sensor.
The top three traces were recorded in the UVW mode. The bottom three
traces are the simulated UVW recordings obtained using the gsac command rotate3 to uvwtril.
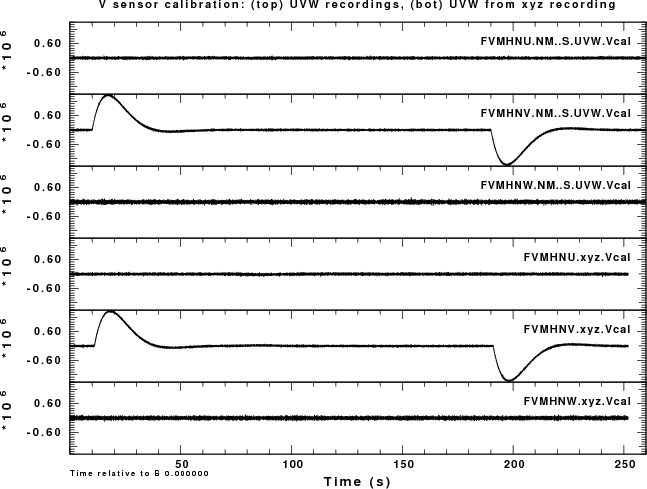
Fig 2. Shows the result of placing a calibration pulse on the V sensor.
The top three traces were recorded in the UVW mode. The bottom three
traces are the simulated UVW recordings obtained using the gsac command rotate3 to uvwtril.
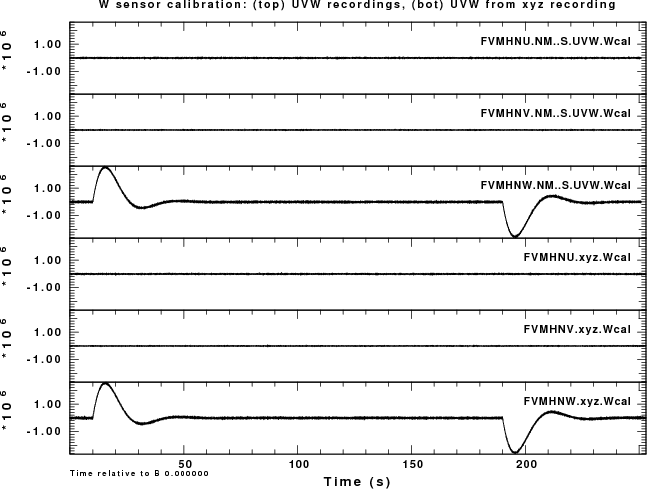
Fig 3. Shows the result of placing a calibration pulse on the W
sensor.
The top three traces were recorded in the UVW mode. The bottom three
traces are the simulated UVW recordings obtained using the gsac command rotate3 to uvwtril.
In these comparisons we see that the peak amplitudes agree, which
means that the software transformation was correctly implemented.
The implementation of the gsac command rotate3 to uvwtril was successfully tested. We conclude that the evaluation of internal sensors mounted in a UVW configuration can be tested using the XYZ (ENZ) output by the use of this new rotation command. This means that one does not have to switch the sensor into a UVW recording mode from the normal XYZ mode.